
LXRobotics
Pika Spark
Pika Spark
SKU: SKU: LXROBO000001PISPR11P
Couldn't load pickup availability
Pika Spark is a matchbox-sized high-performance micro robot control system combining an unprecedented amount of computing power and interfaces within an extremely small form factor.
More information
More information
-
Technical Specifications
Computing
Micro-Processing-Unit (MPU)
NXP i.MX 8M Mini Processor running Yocto Linux with ROS2 in Docker.
- 4 x ARM Cortex-A53 up to 1.8 GHz / core
- 1 x ARM Cortex-M4 up to 400 MHz
- 2GB low power DDR4 DRAM
- 16GB eMMC flash module
Micro-Controller-Unit (MCU)
STM32H747XI Micro-Control-Unit running bare-metal firmware for real-time applications.
- Cortex-M7 core up to 480 MHz with double-precision FPU
- Cortex-M4 core up to 240 MHz with FPU
- 1 MB RAM
- 2 MB Flash
Sensors
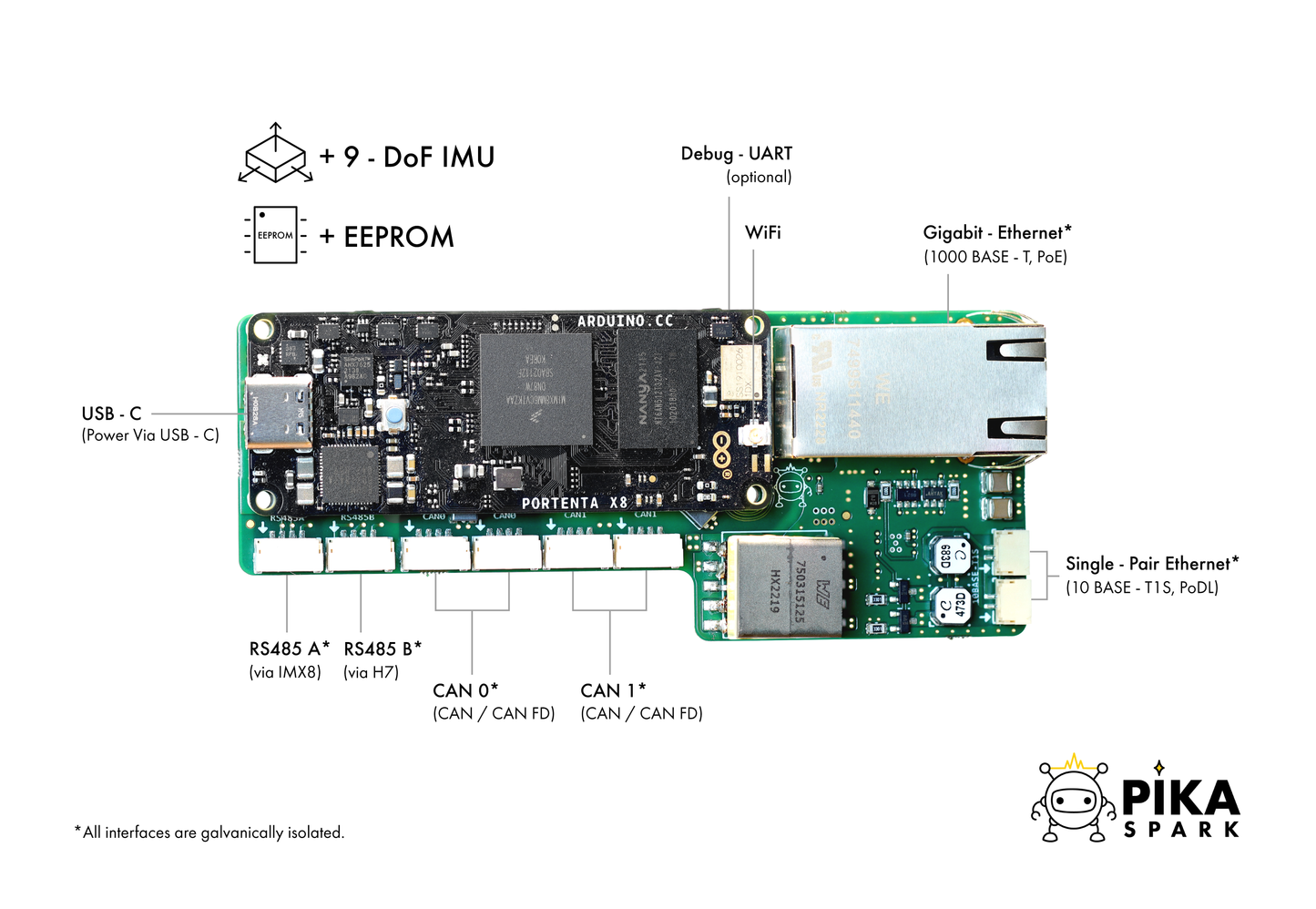
IMU
1 x BNO085 9-DoF Inertial Measurement Unit
-
Interfaces
CAN
2 x CAN, CAN FD (galvanically isolated)
RS485
2 x RS485 (galvanically isolated)
Gigabit-Ethernet
1 x 1000BASE-T (1 GBit/s, galvanically isolated)
Single-Pair Ethernet
1 x 10BASE-T1S (multi-drop capable, 10 MBit/s, galvanically isolated)
UART
1 x Debug UART (115200 8N1)
USB-C
1 x USB-C for flashing the Yocto image and connecting via adb (Android Debug Bridge)
WiFi
1 x WiFi via Murata 1DX
Miscellaneous
Memory
1 x 24LC256 (256 kBit) EEPROM for configuration storage